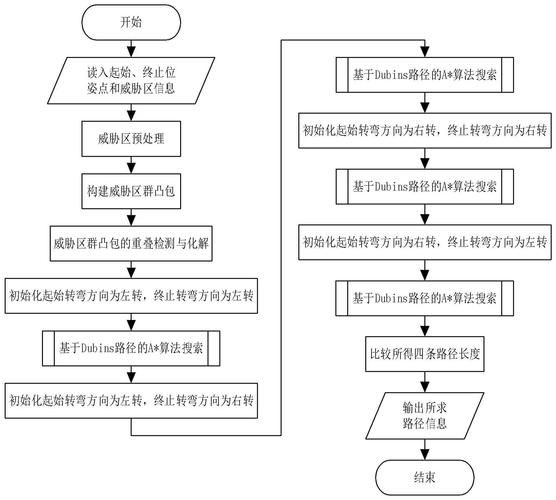
路径规划的方法多种多样,常见的方法包括*基于图搜索的算法(如Dijkstra算法、A算法)、自由空间法、拓扑法等,动态规划三要素是重叠子问题、最优子结构以及状态转移方程**,以下是关于动态规划三要素的相关介绍:
-
重叠子问题:在求解过程中,会遇到许多相互重叠的子问题,在计算斐波那契数列时,计算第n项时需要用到第n-1项和第n-2项,而计算第n-1项又需要用到第n-3项和第n-4项,以此类推,很多子问题是重复计算的。
-
最优子结构:一个问题的最优解包含其子问题的最优解,这意味着如果一个问题可以分解为多个子问题,那么原问题的最优解可以通过这些子问题的最优解来构造,在一个最短路径问题中,从起点到终点的最短路径必然是由起点到各个中间节点的最短路径拼接而成。
-
状态转移方程:它是动态规划中用来描述状态之间转换的方程,通过这个方程,可以根据前一个或几个阶段的决策来确定当前阶段的决策,从而逐步构建出整个问题的最优解,状态转移方程通常是根据具体问题的实际情况推导出来的,它是动态规划的核心所在,对于0/1背包问题,其状态转移方程可以表示为$F(n, C) = \max{F(n-1, C), F(n-1, C-w_n) + v_n}$,F(n,C)$表示考虑前$n$件物品、容量为$C$的背包能够获得的最大价值,$w_n$和$v_n$分别表示第$n$件物品的重量和价值。
理解并应用动态规划三要素,可以帮助人们更高效地解决复杂问题,提高算法的性能和效率。
收藏
点赞
本文来自作者[扶宏达]投稿,不代表智博立场,如若转载,请注明出处:https://zhibor.cn/changshi/202503-25132.html
评论列表(4条)
我是智博的签约作者“扶宏达”!
希望本篇文章《路径规划的方法分为 动态规划三要素是》能对你有所帮助!
本站[智博]内容主要涵盖:知识科普
本文概览:路径规划的方法多种多样,常见的方法包括*基于图搜索的算法(如Dijkstra算法、A算法)、自由空间法、拓扑法等,动态规划三要素是重叠子问题、最优子结构以及状态转移方程**,以...